The Yaskawa SDK enables seamless integration with Yaskawa robots for automation, data exchange, and remote control. Ideal for industrial automation, research, and advanced robotics applications.
It allows you to connect to a real robot.
🔗 More Information: https://underautomation.com/yaskawa
🔗 Also available for 💻 .NET & 🐍 Python
⭐ Star if you like it !
👁️ Watch to be notified of latest updates !
A powerful and efficient LabVIEW library for communicating with Yaskawa Motoman industrial robots using the High-Speed Ethernet Server (HSES) protocol. Enables seamless connectivity, motion control, and data acquisition.
✅ No additional installations or Yaskawa options are required to use this SDK.
Key Benefits:
- 📡 Fast & Reliable: Leverage high-speed UDP communication for real-time control.
- 🛠️ Easy Integration: Works with .NET projects, compatible with VB.NET and C#.
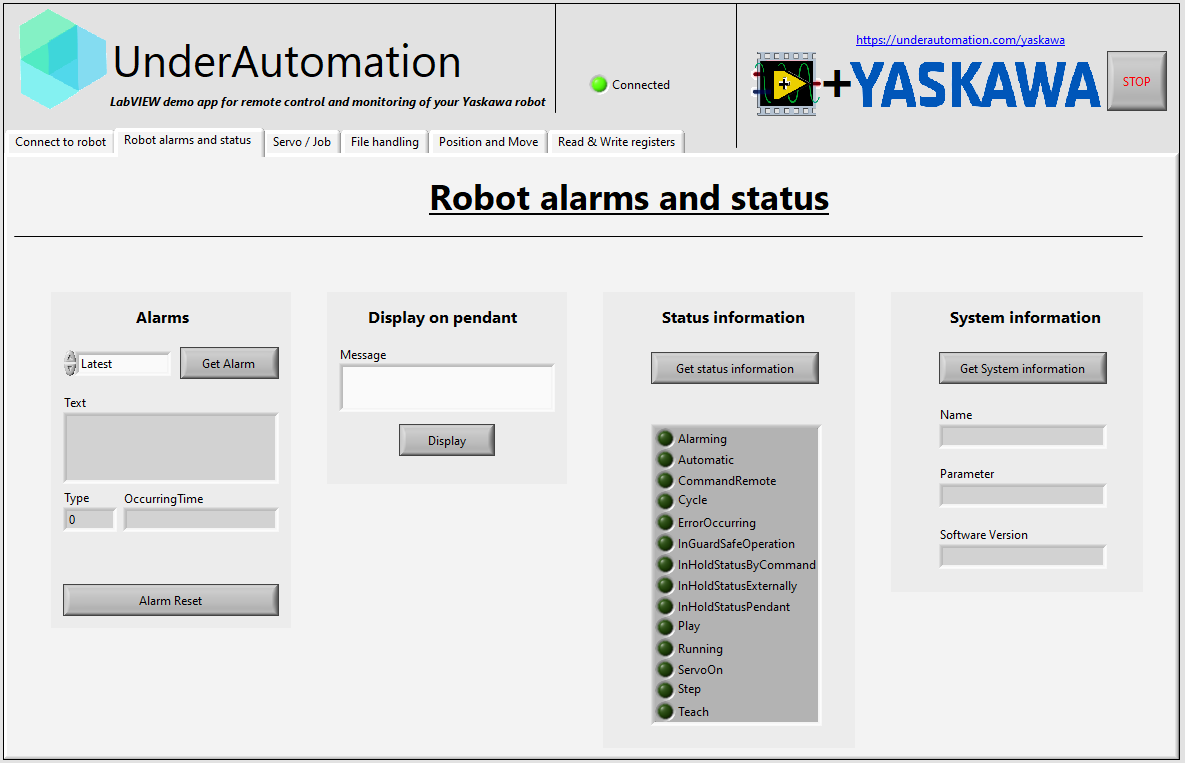
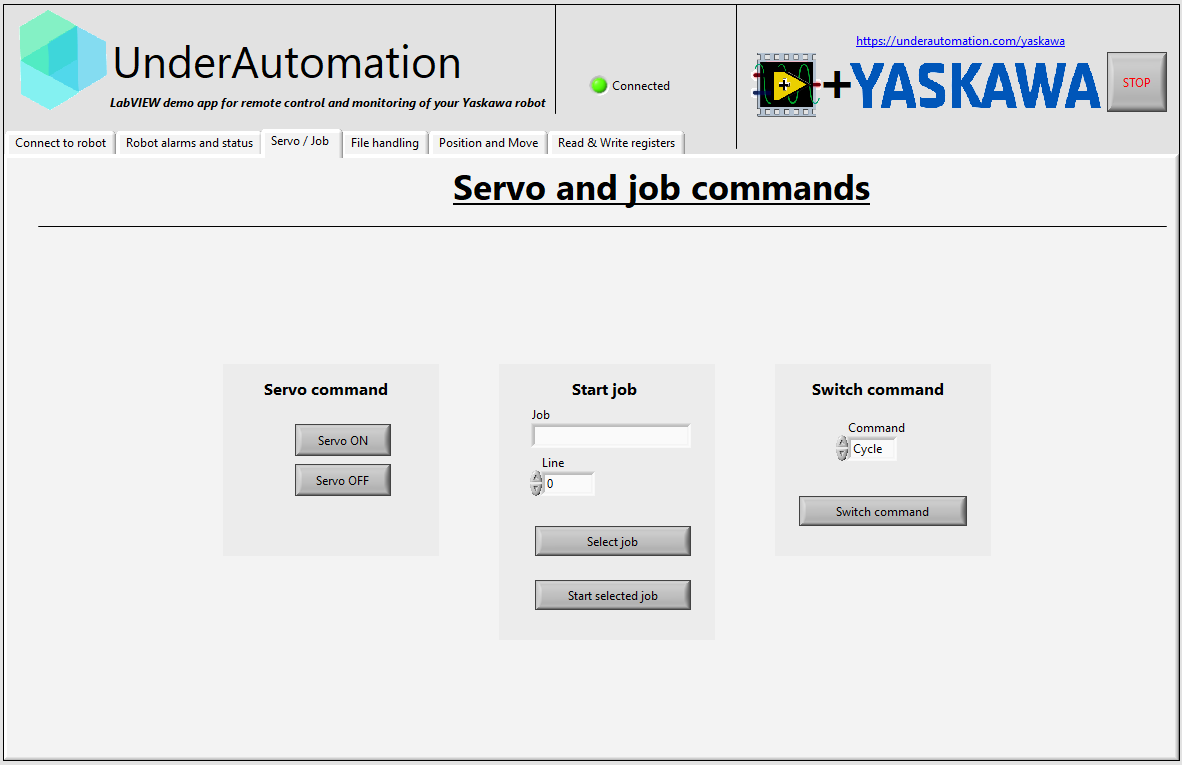
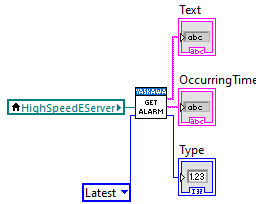
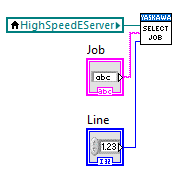
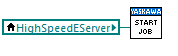
- 🤖 Advanced Features: Supports status monitoring, alarm handling, job selection, and more.
- 🌎 Cross-Platform: Works with Windows/Linux using .NET Core.
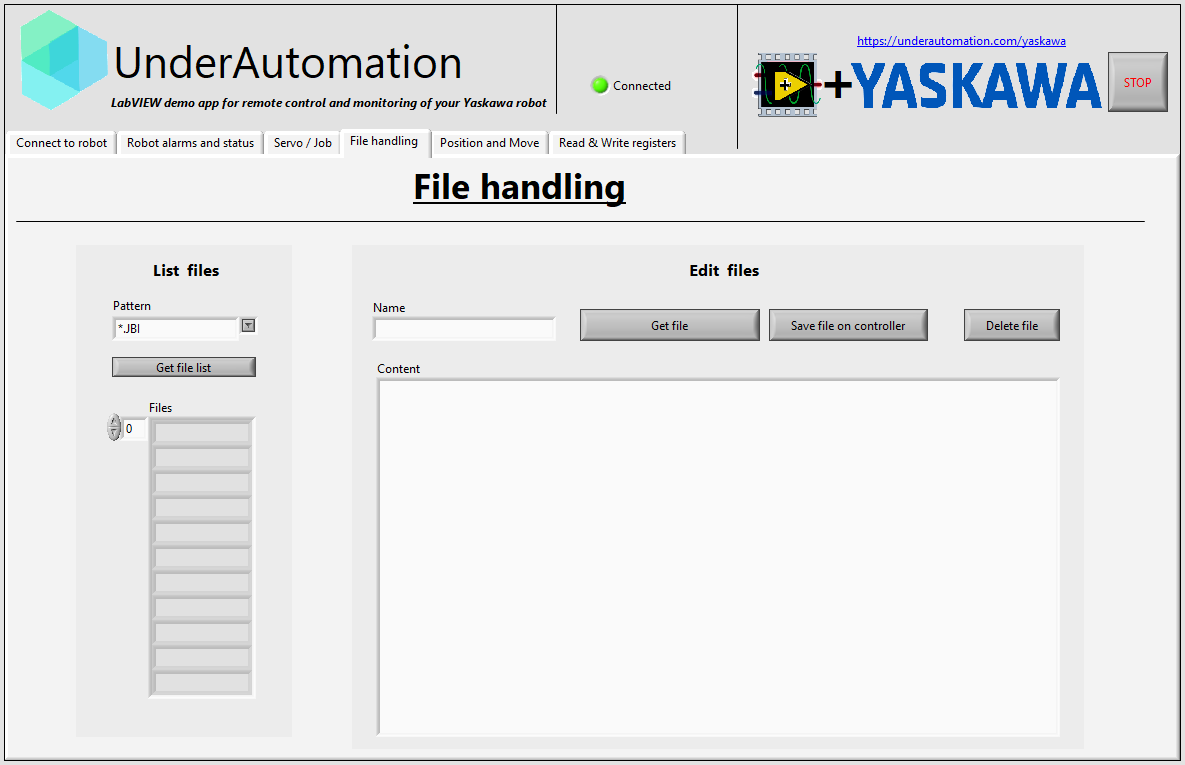
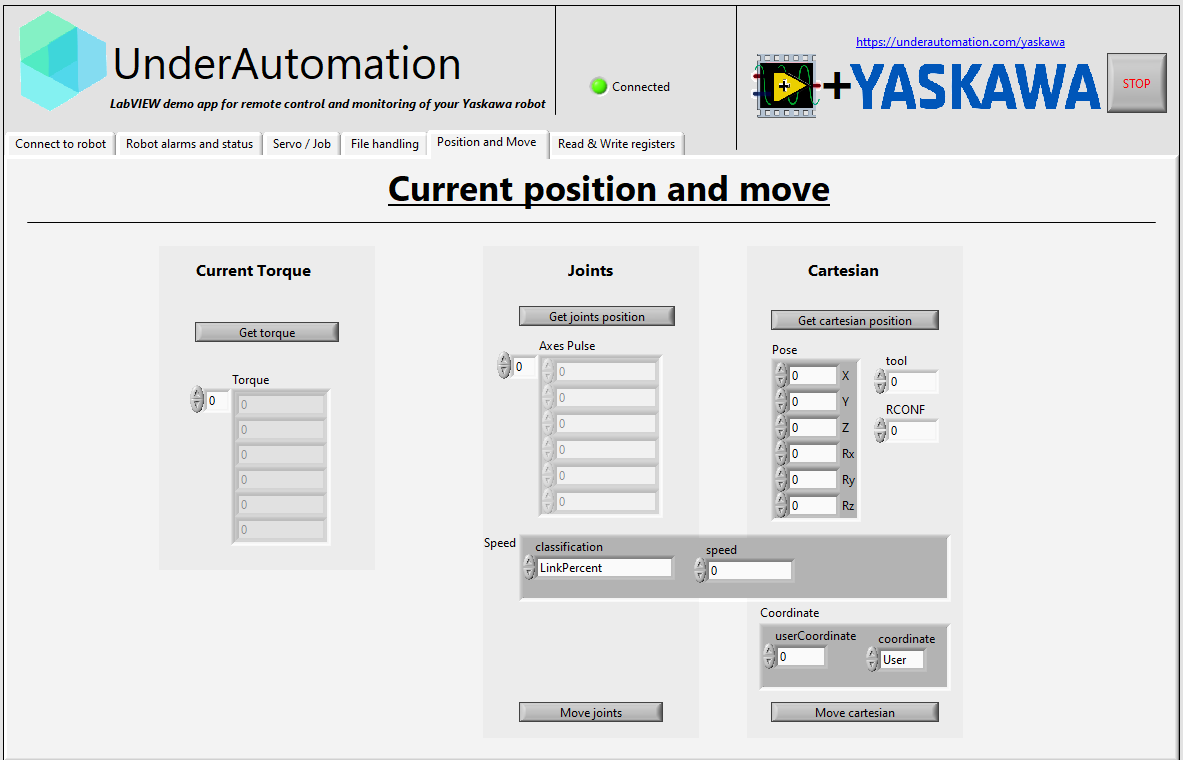
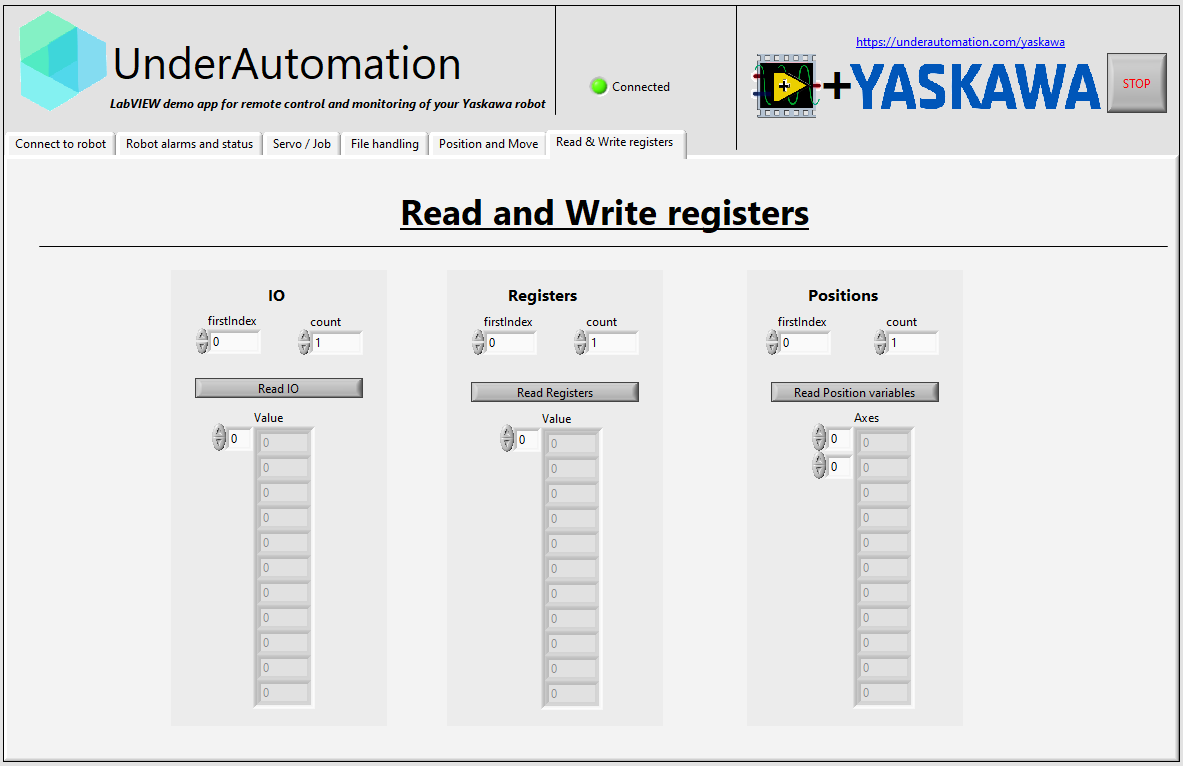
Explore the Yaskawa SDK with fully functional example applications for your LabVIEW version.
📌 Download: 📥 UnderAutomation.Yaskawa.lvproj
The library is a set of .vi files grouped under a library UnderAutomation.Yaskawa.lvlib.
📌 Download: 📥 UnderAutomation.Yaskawa.lvlib
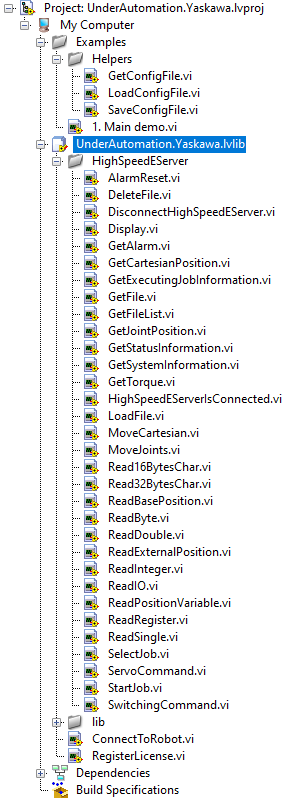
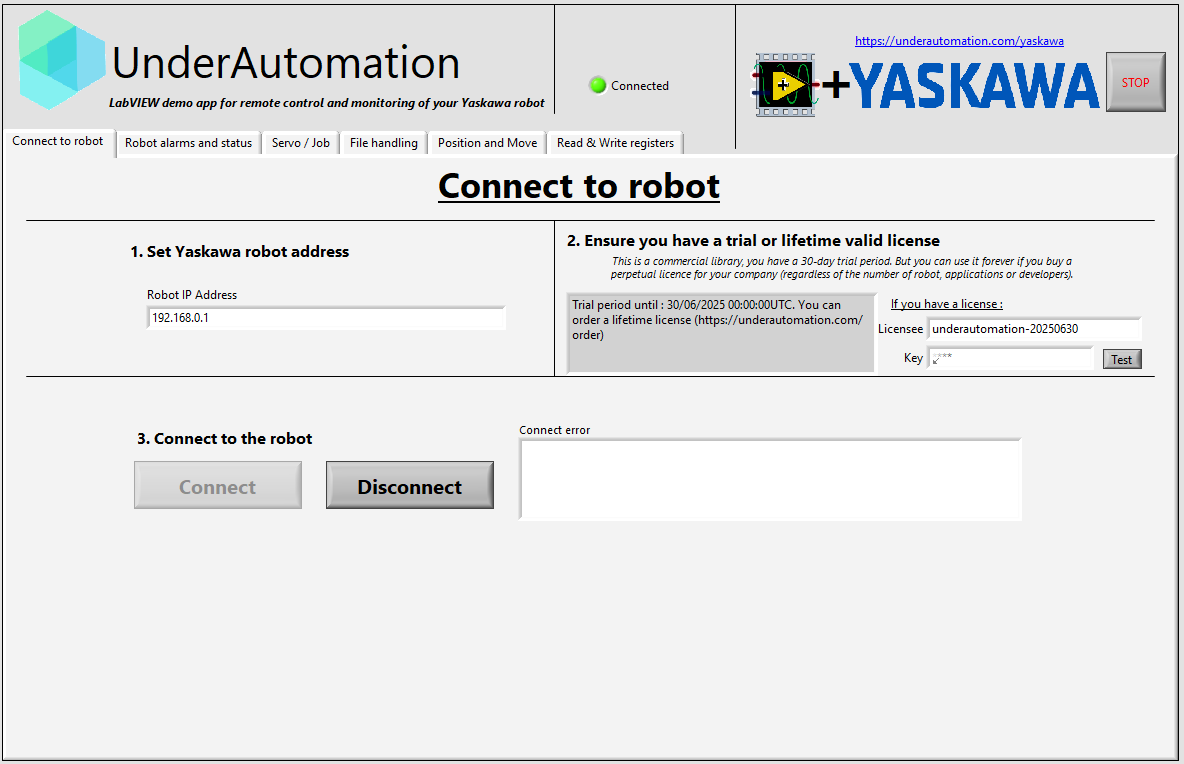
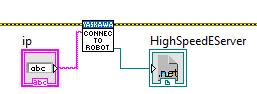
ConnectToRobot.vi allows you to connect to the robot using its IP address.
This VI returns an instance of the robot the High-Speed Ethernet Server protocol. These returned values are to be used as input to the VIs described below.
- 16 Bytes Char
- 32 Bytes Char
- Byte
- Double
- Integer
- Register
- Single
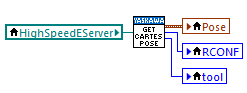
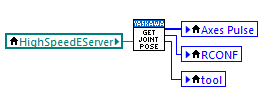
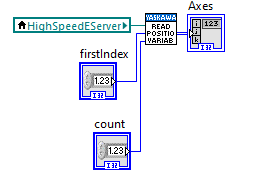
- Base Position
- External Position
- Position Variable
✅ Supported Robots: DX200, YRC1000, YRC1000 Micro
✅ Operating Systems: Windows
✅ LabVIEW Versions: LV2010 and newer
We welcome contributions! Feel free to:
- Report issues via GitHub Issues
- Submit pull requests with improvements
- Share feedback & feature requests
🔗 Learn more: UnderAutomation Licensing
If you have any questions or need support:
- 📖 Check the Docs: Documentation
- 📩 Contact Us: Support