7.0.0 Release Notes
Please carefully read all of this document for the best possible experience and safety.
Contact other pilots, share experiences, suggestions and ask for help on:
| INAV Discord Server | |
| INAV Official on Facebook |
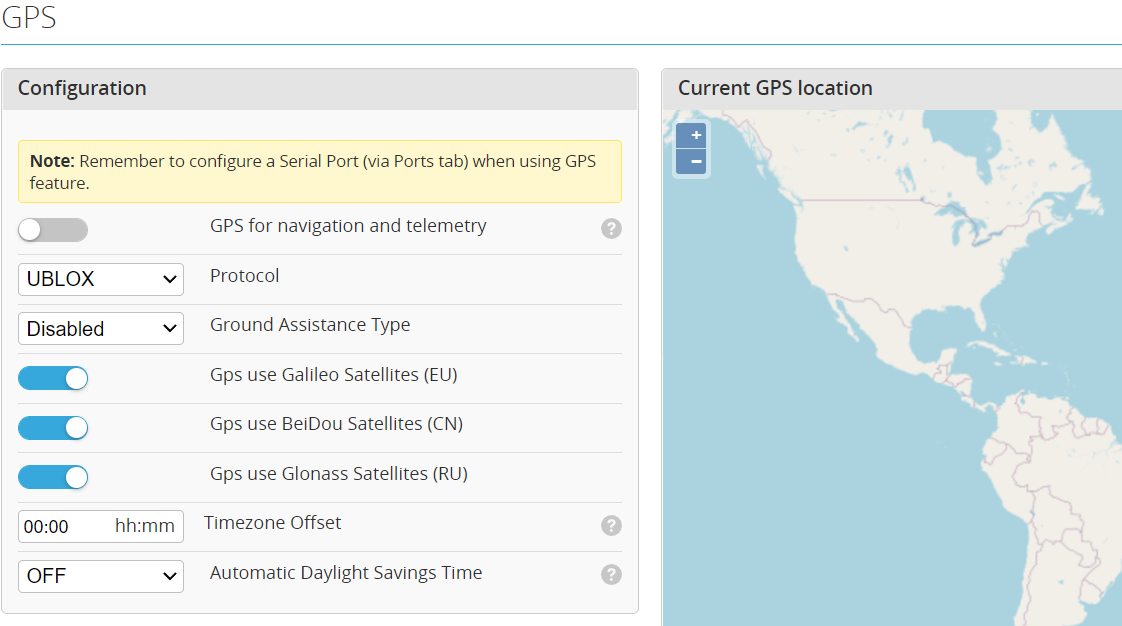
The GPS NMEA protocol is no longer supported. All pilots are required to switch to UBLOX protocol. All modern GPS modules (even as old as from 2015 and earlier) support UBLOX protocol and there is not a single good reason to stick to NMEA nowadays
The FrSky D-series telemetry support has been removed. This applies to legacy D4R receivers and some 3rd party whoop boards
- Download and install the new INAV Configurator 7
- Save to a file the current diff all from the CLI.
- Upgrade to INAV 7 using the Full Erase option in the configurator.
- In case of Analog FPV, upload your OSD font of choice from the OSD tab.
- Go to the CLI again and paste the above-described contents from the file you previously created and write save , press ENTER.
- There are many new, changed, and removed settings. Check carefully that the settings are correct and fix any unrecognized or out-of-range items from the saved configuration.
- You should be ready, explore new 7.0 features, and enjoy!
Please follow the instructions on this page.
INAV now was a function that allows to flexibly assign functions to PWM outputs directly from INAV Configurator.
Specific function AUTO, MOTORS or SERVOS can be assigned to each Timer Group. Then, all outputs from this group will perform this function.
Thanks to this, it's possible to use servos and motors in ways that previously required building a custom targets.
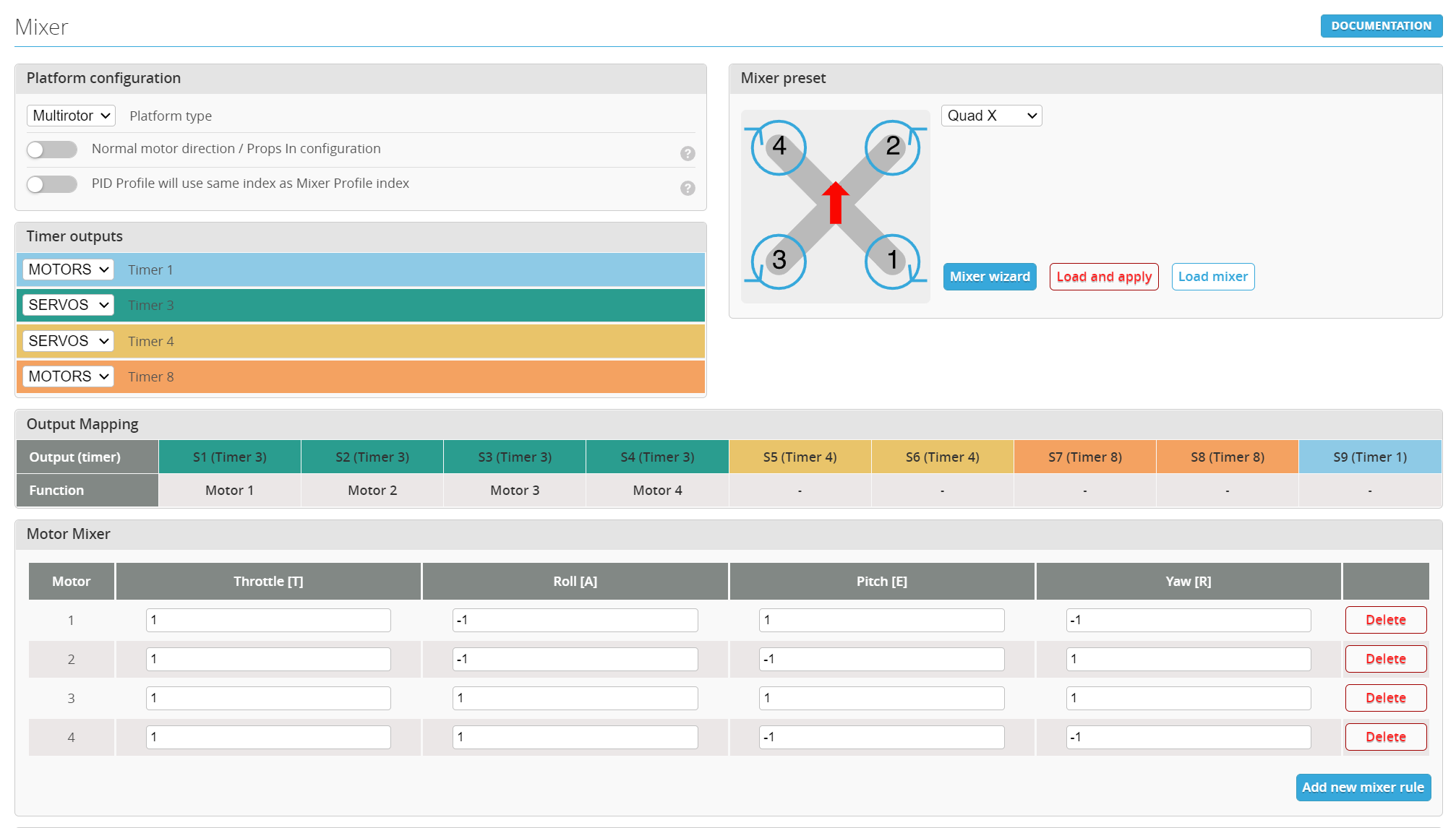
Bear in mind:
- In some rare cases, output assignment migh be different than in INAV 6
- It is not possible to assign function to individual outputs. It's a hardware, not software limitation.
Read more in INAV docs
INAV 7 adds the DMA Burst mode to selected target as ultimately fixes the problem of DSHOT protocol not working on some boards. Pilots do not have to take any actions, DSHOT is just available on previously affected flight controllers. This applies to:
- Matek F405 TE
- SpeedyBee F405 V3
The JETI EXBUS protocol should now not hang the flight controller during operation. The issue was originally fixed in https://github.com/betaflight/betaflight/pull/13130 . Thank you @SteveCEvans and @klutvott123
As mentioned in the Important Notes section, INAV 7 no longer supports the GPS NMEA protocol. All modern GPS module support one of the UBLOX protocols and as a result pilots must switch to either UBLOX or UBLOX7 protocol.
- The
AUTOLEVELmode is renamed toAUTO LEVEL TRIM
- FrSky D-series telemetry
-
output_modesetting that allows to reassign all PWM outputs to either MOTORS or SERVOS
- SDmodel H7V1
- Matek H743HD
- SpeedyBee F405 V4
- SpeedeBee F405 Mini
- SpeedyBee F2 Mini V2
- GEPRCF405
- GEPRCF722
- NEUTRONRC F435 Mini AIO
| Name | Values |
|---|
| Name | Description |
|---|
| Name | Description |
|---|
The full list of changes is available here The full list of INAV Configurator changes is available here